






斯坦福大学公开课:机器人学
本课程共16集 翻译完 欢迎学习
斯坦福大学公开课:机器人学[第11集] 关节空间动力学
课程介绍:
该课程涉及内容:机器人运动学、动力学、控制、运动规划、编程及设计等。
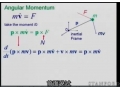
机器人学11课开始的视频片段介绍了侦查机器人和漫步者机器人。侦查机器人用于探测并传回数据,漫步者机器人用于部署侦查机器人。本课开始讲解动力学然和控制方面的知识。首先学习单个刚体的动力学,然后把不同的动力学结合起来,最后考虑整个铰链式多体系统。为此,就需要研究牛顿-欧拉公式和拉格朗日方程。基于以上的公式,就可以使我们得到铰链体系统的动力学的显式形式。接下来教授通过两个例子进行具体讲解,然后逐步将上面的几个问题细化讲解。



