


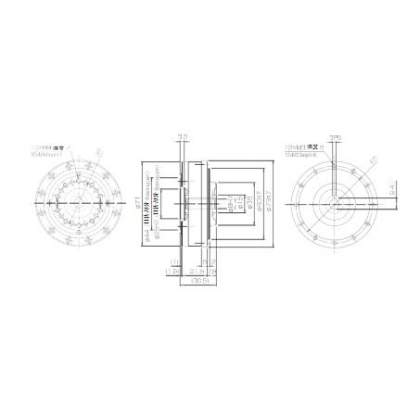
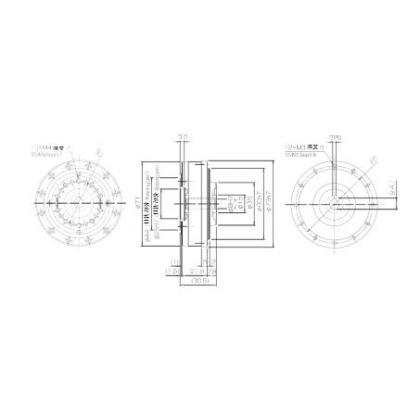


1.通过采用差动式减速机构和薄型交叉滚子轴承, 实现超扁平形状,为设备的尺寸紧凑做出贡献。
2.提高啮合率分散负载,故刚性极高。
3.通过各部件间隙的最佳化配置,可以实现背隙3arcmin以下 的高精度定位。
4.封入油脂,实现免维护。无需加油,没有安装方向限制。
5.通过精密次摆线齿轮和高精度滚销的复数啮合, 实现更高传动精度。
6.设置适当的压力角,实现圆滑动作且高效率。
7.可以对应各电机公司的安装尺寸,购买后可以立即安装电机。
应用范围
1.脚踏式移动工具
2.探查机
3.多关节机器人
4.水平多关节机器人
5.人形机器人
6. 行走辅助装置
多关节机器人



