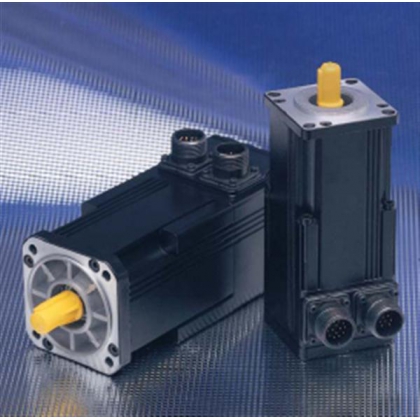
MicroE Veratus系列小巧型精密光栅
Veratus系列精密光栅适用于世界上各种设备和仪器的小巧型精密光栅,利用MicroE提供的新的VeraPath技术而构建,Veratus采用高级光学滤波和最先进的信号处理和电子技术,确保了低位置噪音(抖动)和在多种操作条件下平滑的速度控制。Veratus具有高达20纳米的分辨率,并提供行业标准的模拟和数字增量编码器输出、LSB零位以及易于安装磁限位和零位选择标记。
Veratus是同级别编码器中具有以下特性的唯一的编码器:精密工业应用所需的可靠性、信号稳定性和抗污能力,并且所有的插补、AGC和信号处理均在传感器头中进行。无需额外的电路板、适配器或调试工具。
Veratus兼容MicroE的线性光栅刻度表,具有强大的性能,且易于安装。
• 内置限位,灵活的零位选择
• 多种线性光栅刻度表的选择
• 在传感器头中装有校准/状态LED 指示灯
|
规格 |
|
|
尺寸: |
35 x 13.5 x 10.2 毫米 |
|
接口: |
A-quad-B数字接口或1 VPP正弦/余弦模拟接口 |
|
分辨率:(传感器头中插补) |
5 微米 – 20纳米(线性) |
|
精度等级: |
+/- 1 微米(线性玻璃) +/- 3 微米(线性金属带状) |
|
输入电压: |
5 伏直流电 |
|
电源电流: |
220毫安,120Ω,同时适用于 A, B, I 170毫安,120Ω,适用于正弦/余弦,IW |
|
最大速度: |
5米/秒 |
|
零位: |
IW适用于模拟和5微米数字 LSB适用于2.5 微米以上数字接口 |
|
输出: |
正弦/余弦或A-QUAD-B、零位、限位(2)、警报 |
|
状态LED指示灯: |
有 |
|
操作环境: |
大气 |
|
栅距: |
20 微米 |
|
可重复性:(磁滞) |
< 1 LSB |
|
典型的细分误差(SDE): |
<20纳米RMS |
|
重量: |
< 15 克传感器头,< 30 克/米电缆 |
|
光栅兼容性: |
线性 |

优点
• 在多种应用和环境中具有极大的抗污能力和可靠性能;先进的光学滤波和信号处理能力
• 占用面积小;在传感器头中进行插补和信号处理
• 自动校准;即插即用 - 无需工具或按钮
• 多种安装配置
• 内置限位,灵活的零位选择
• 多种线性光栅刻度表的选择
• 在传感器头中装有校准/状态LED 指示灯
规格
|
系统 |
|||
|
刻度表 Veratus系列编码器与Veratus带状和线性玻璃兼容 |
|||
|
刻度表间距 |
20微米 |
||
|
系统分辨率 |
5微米, 2.5微米, 1微米, 0.5微米, 0.2微米, 0.1微米, 50纳米, 20纳米模拟1 Vpp (订购时请指定分辨率) |
||
|
精度 |
|||
|
带状 |
SDE: 线性: 斜率: |
<20纳米RMS2 <±3 微米(最大/米) <±50 微米/米 |
|
|
线性玻璃 |
SDE: 总精度: |
<20纳米RMS2 <±2 微米/米1 |
|
|
传感器尺寸和重量 |
长度 |
宽度 |
高度 |
|
尺寸(毫米) |
35.0 |
13.5 |
10.2 |
|
重量 |
< 15克传感器头 < 30克/米电缆 |
||
|
传感器电缆 |
8双绞线双屏蔽,长度可达5米 |
||
|
注意130毫米以下主要是第一和第二谐波 |
|||
|
工作和电气规格 |
|
|
电源电流 |
|
|
AquadB, 5 VDC +/- 5%: |
<220毫安,120欧姆(在A, B, I上) <160毫安,无载荷 |
|
AquadB, 5 VDC +/- 5%: |
<170毫安,120欧姆(正弦/余弦,IW) <140毫安,无载荷 |
|
准备时间 |
<0.5秒,一旦功率> 4.5伏 |
|
温度操作: 温度储存: |
-20°C - 70°C -20°C - 85°C |
|
湿度操作: 湿度储存: |
10%到90%RH,无冷凝可达 85%RH,无冷凝 |
|
振动 |
10克,55赫兹到2千赫;EN60068-2-6 |
|
加速 |
50克:EN60068-2-7 |
|
输出 模拟:正弦/余弦差分数字:AquadB差分 零位:零位窗口(仅限模拟和5 微米数字), 1 LSB(数字2.5微米及以上) 右和左限位单端,集电极开路24 V兼容 报警为集电极开路 |
|
|
信号电平 A/B/I(差分):兼容RS-422 A/B/I(单端,无端接):高> 4.2 VDC,低<0.2 VDC 正弦/余弦: 1 Vpp(在120欧姆端接上),2 Vpp无端接,共模电压 2.0 VDC 报警:上拉到编码器电源电压最大限位:上拉到最大 24 V |
|
最大速度(数字)
最大速度(超速缓冲保护前3)/ 插补深度
最大速度(模拟)
|
控制器推荐AQB最大状态速率 MEGASTATES/秒) |
实际编码器 AQB最大状态速率MEGASTATES/秒) |
5000 |
2500 |
1000 |
500 |
200 |
100 |
50 |
20 |
分辨率(纳米) |
|
4 |
8 |
20 |
40 |
100 |
200 |
400 |
1000 |
插补深度 |
||
|
20 |
17.50 |
5000 |
5000 |
5000 |
5000 |
3500 |
1750 |
875 |
350 |
最大速度(毫米/秒) |
|
10 |
8.75 |
5000 |
5000 |
5000 |
4375 |
1750 |
875 |
437 |
175 |
|
|
5 |
4.38 |
5000 |
5000 |
4375 |
2187 |
875 |
437 |
218 |
87 |
|
|
2 |
1.75 |
5000 |
4375 |
1750 |
875 |
350 |
175 |
87 |
35 |
|
|
1 |
0.88 |
4375 |
2187 |
875 |
437 |
175 |
87 |
43 |
17 |
|
|
注意 Veratus实现了超速缓冲保护(OBP)。即使超过最大指定状态速率,对于低于5830毫米/秒的速度,也不会丢失任何AqB计数。 ALARM位以5.83米/秒设置为TRUE,但是,Veratus将继续产生高达7米/秒的有效AqB输出,尽管不再保证精度要求。 |
||||||||||
正弦/余弦矢量幅度:> 0.5 Vpp,速度为5米/秒
VeraPath耐污染性
首先,Veratus系列编码器利用以下特点来最大限度地减少刻度表污垢的影响:
• LED光源
• 高级过滤光学技术
• 检测器面积大
• 最先进的信号处理技术
污染原因
其次,VeraPath最大限度地减少由污染引起的光学扫描错误,例如:
• 油膜
• 灰尘
• 水
• 指纹
最后,通过高级信号处理使Veratus内部控制回路生成校正,传感器光学和内部控制回路使得功能强大的位置检测器具有极高的抗污染性:
• 自动矢量幅度控制(AVMC)
通过碎片并随时间的推移将Lissajous直径调整为恒定的1Vpp
• 自动偏移控制(AOffC)将Lissajous原点调整为0.0伏,以最小化SDE误差
• 自动增益跟踪控制(AGainTC)平衡正弦/余弦的幅度,使得Lissajous呈圆形以最小化SDE误差
• 自动共模输出电压控制(ACMOV)将正弦/余弦的共模输出电压调整为
2.0VDC与编码器对齐无关
使用新的VeraPath技术,Celera Motion能够在尖端工业应用中,当编码器在暴露的(恶劣)环境下工作时,以金属刻度表提供所需的抗污性,可靠性和精度。VeraPath滤除由刻度表上的划痕和金属刻度表平面度的典型变化引起的信号干扰,从而使金属刻度表和玻璃刻度表都实现了高水平的精度。当运动控制系统在长的线性平台上需要精密光学编码器或需要优先采用金属带状刻度表的执行器时,这特别有利以上情形。更多信息请电联我们,另最近优惠多多。
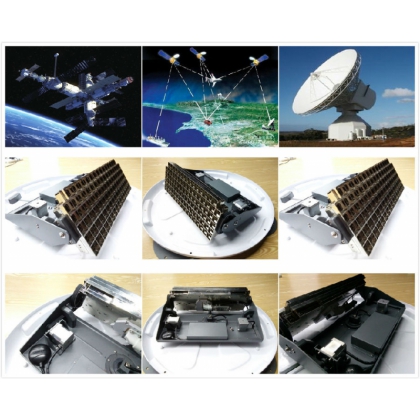
应用
MicroE基于技术的组件可以用于构建独特的应用程序,以实现紧凑的外形系数、高性能和精密运动。无论是用于计量应用的定位系统、用于医疗设备的机械臂,还是用于卫星通信的远距离指向机构,MicroE均可运用其专业知识和产品为您的应用提供最佳解决方案。
我们对各种行业使用的产品及其设计周期都拥有多年的丰富经验,这使我们成为应对运动控制难题的首选供应商。
案例
下面我简单介绍下手术机器人手臂的案例。Veratus 系列编码器的占用空间小这一优点使客户可以将两个编码器集成到机器人手臂的关节之中,在关节上的两个不同位置测量和平均分配位置,以提供高度精确的位置测量。
挑战:客户要求在最小的外形尺寸中实现对多个连续机器人手臂关节的精密旋转轴控制。其他关键要求还包括在启动时保证最小移动以报告绝对位置,以及最少的信号布线以使手臂总尺寸尽可能小。
解决方案:MicroE开发出一系列定制尺寸的基于PCB的编码器模块,它们具有FPGA控制和BiSS通信接口,每个模块都有两个标准的ChipEncoder™读出磁头和一个Micro Motion Absolute™(MMA)旋转光栅盘。MMA光栅技术采用标准的40微米间距增量计数磁道,与基准磁道耦合,其中每个零位独特地间隔开。在启动时仅有很小的移动,检测多个零位标记,并且将测量的间隔与固件中的查找表进行比较以确定绝对位置。
优点:两个编码器的输出被平均开来以提高旋转精度,并且在启动时以最小的轴向旋转来确定绝对位置。BiSS串行通信协议允许每个连续的机器人关节以雏菊链方式连接,而不是为每个轴提供专用总线电缆,这与小尺寸的ChipEncoder™结合在一起,有助于减小每个关节的总体尺寸。高速串行通信(32MHz时钟,1微秒更新速率)确保机器人对操作员的命令的高响应性。
规格
|
PCB直径 |
20毫米 |
|
刻度表直径 |
15毫米 |
|
模块总高度 |
13.8毫米 |
|
串行接口 |
BiSS C |
|
时钟频率 |
32 MHz |
|
位置更新率 |
1微秒 |
|
分辨率 |
插补后为42,640 CPR(30.4 弧秒) |
|
电缆线数 |
5条双绞线,32AWG |
如果标准型号和结构无法满足您的需要,我们会能根据您的要求提供定制解决方案。请联系我们1-8-5-1-0-0-8-5-6-6-6。