手机版
二维码
购物车
(
0
)
资讯
应用
产品
求购
厂商
展会
专题
下载
热搜:
发那科机器人
ABB机器人
机器人控制器
工业机器人控制系统
HD谐波减速机
ABB工业机器人
工业机器人控制器
机器人
工业机器人技术
进口二手机器人
首页
资讯
应用
产品
求购
厂商
展会
专题
下载
人形机器人
首页
>
视频
>
工业机器人
>
打磨机器人
>
三轴机械手臂不锈钢镜面研磨应用方案
感知器介绍
16521次播放
影像轮廓追踪方案
14411次播放
三轴机械手臂不锈钢镜面研磨应用方案
2262次播放
双六轴机械手臂线缆拔插应用方案
1920次播放
六轴机械手臂水五金研磨应用方案
2286次播放
日期:2017-04-26 播放:
2262
评论:0
6
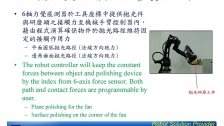
轴力觉传感器于工具坐标中提供抛光件与砂轮带之接触力至机械手臂控制器内,藉由程序演算确保对象于抛光路径维持固定的接触作用力,影片中以
SU304
不锈钢材为例
,
原始粗度
Ra
是
3.082µm
,最终粗度是
0.037µm
更多
>
推荐视频
发那科R-2000iB_210F卡车车辋抛光
2014-04-03
2979次播放
ABB工业机器人抛光-1
2014-02-21
4336次播放
KUKA机器人研磨和抛光的植入
2014-02-17
2558次播放
KEBA KeMotion 完美的 机器人 控制系统 主动 自适应法兰 抛光 打磨
2013-12-27
3323次播放
KEBA KeMotion 完美的 机器人 控制系统 主动 自适应法兰 抛光 打磨
2013-12-25
2742次播放
发那科M-900iA_350铸造零件磨削
2013-12-02
2360次播放
发那科M-10iA砂带磨削和抛光的管道处理
2013-09-05
2732次播放
购物车
(
0
)
站内信
(
0
)
新对话
(
0
)
会员服务
|
发布信息
|
会员中心
|
返回首页