一、直角坐标机器人的特点
1、多自由度运动,每个运动自由度之间的空间夹角为直角。
2、自动控制的,可重复编程,所有的运动均按程序运行。
3、一般由控制系统、驱动系统、机械系统、操作工具等组成。
4、灵活,多功能,因操作工具的不同功能也不同。
5、高可靠性、高速度、高精度。
6、可用于恶劣的环境,可长期工作,便于操作维修。
二、直角坐标机器人的构造
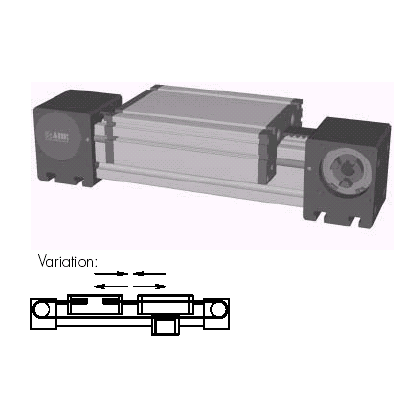
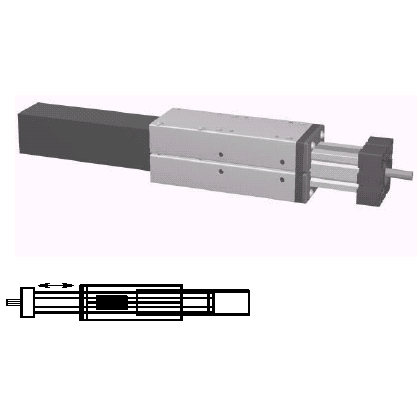
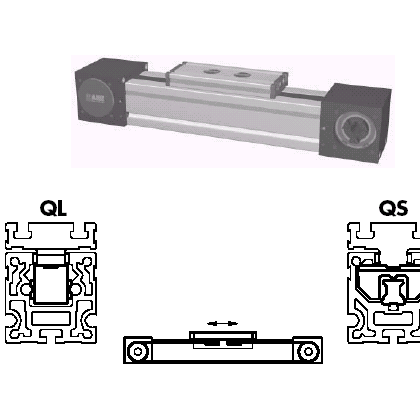
1、直线定位系统:众拓机器人生产的ZTR直角坐标机器人所采用定位系统是德国BAHR直线定位单元。
2、驱动系统:能够使定位系统准确定位。
3、控制器:控制器相当于人的大脑,通过运动控制从而实现机器人的灵活多变的运动功能、迅速的反应处理功能
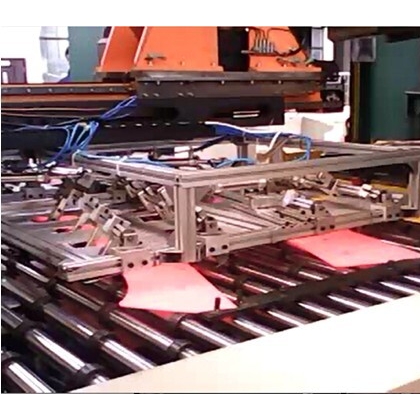
4、操作工具:直角坐标机器人的终端设备根据用途不同,可以装配各种各样的操作工具:如焊接机器人的终端操作工具是焊枪:码垛机器人终端操作工具是抓手;涂胶(点胶)机器人终端操作工具是胶枪、检测(监测)机器人终端操作工具是相机或激光。
沈阳众拓ZTR系列直角坐标机器人的结构类型
工业机器人每个运动自由度运动关系空间三个相互垂直的方向X、Y、Z上作移动运动,运动是独立的,可以方便的在Z轴加上两个旋转的自由度,形成五坐标机器人。其控制简单,运动直观性强,易达到高精度,运动的速度较快,行程可大可小,占据的空间相对较大。
ZTR直角坐标机器人的基本技术指标
1、负载:从5Kg到3000Kg不等;
2、重复定位精度:从±0.2mm、±0.1mm、±0.05mm到±0.01mm 3、定位单元最大行程:18m, 4、驱动形式:丝杠、滚珠丝杠、同步带、齿轮齿条、伺服电机。